阅读以下关于嵌入式实时系统设计的相关技术的描述,回答问题1至问题3。
【说明】
某公司长期从事嵌入式系统研制任务。近期公司承担了一项面向交通领域的智能交通系统(ITS),为了将信息、通信、传感、控制及计算机等技术有效地集成运用于整个地面交通管理,达到智能交通管理的要求,经公司讨论决定,采用信息物理融合系统(Cyber Physical System, CPS)技术来保证ITS达到实时、准确、高效的智能交通管理的目的。公司领导层将此任务交给王工负责。王工在广泛调研的基础上提交了总体实施方案供讨论,大家在高度肯定总体实施方案的基础上,提出了一些问题,并就这些问题提出了补充意见。
【问题1】(9分)
王工在总体实施方案中指出:CPS是在嵌入式系统、传感器技术和网络技术的基础上发展起来的,嵌入式系统使设备具有智能化能力,传感器网络使设备具有感知能力,这两者的结合就产生了“计算深度嵌入物理过程中”的效果,使得物理系统能力得到扩展,并且计算与物理过程相互影响作用,这正是CPS的系统目标,也是智能交通管理系统的最终目标。基于此需求,对比现有系统,报告分析出CPS系统应具有十项需求,其中:异质性(heterogeneity)、分布性(distribution)、动态重组(recomposition)和重配置(reconfiguration)是CPS的关键需求。请用300字以内的文字解释说明上述三个需求的具体含义。
【问题2】(11分)
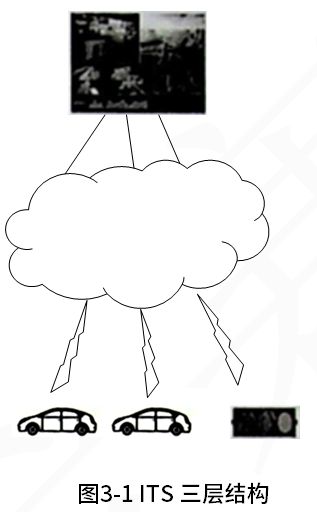
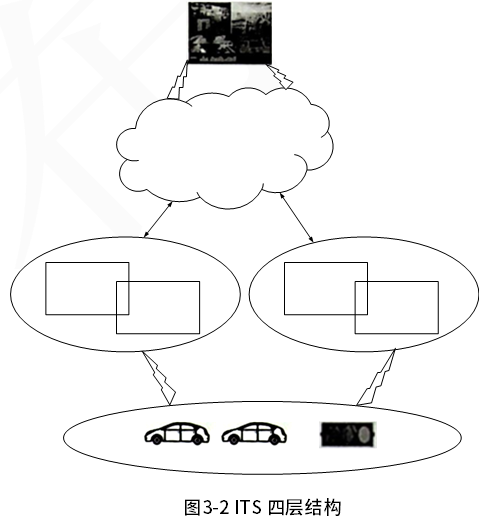
讨论会上,与会者在CPS的体系结构构建上出现意见分歧,王工提出的智能交通管理系统拟采用传统的CPS三层体系结构(即物理层、网络层和应用层)。张工对此方案提出了异议,认为三层体系结构不能体现智能、融合等特点,由于智能交通管理系统信息量大,计算和控制是关键,应考虑将系统分解为四层体系结构,以充分体现智能、控制和信息融合的特点。经讨论,最后采纳了张工的建议。图3-1和图3-2分别是王工和张工提出的分层体系结构。请用150字以内的文字简要说明王工提出的三层体系结构中各层的功能划分,并详细分析图3-2,指出张工提出的四层体系结构与王工提出的结构存在的差异,并说明四层体系结构的两个显著优点。
【问题3】(5分)
王工在总体实施方案中强调,智能交通管理系统采用CPS体系结构后,由于本系统安全与否,直接涉及车辆、驾驶员以及行人的生命安全,因此必须开展智能交通管理系统的安全性分析,寻找出潜在风险。通常风险可分为基本风险和特定风险,而特定风险涵盖了人为因素带来的风险和环境因素带来的风险。请识别出智能交通管理系统存在的5种特定风险。
【问题1】
(1)异质性。CPS网络将异质部件进行互联,这些异质单元可能包括不同功能的设备、不同公司生产的设备、软件系统不同的设备,甚至编码系统不同的设备。CPS要实现这些异质设备间的无障碍的互操作,需要采取一些“翻译”措施。
(2)分布性。CPS系统中存在大量网络化的嵌入式计算,这些嵌入式计算组成了分布式计算的网络,每个结点的能力有限,是一种典型的分布式计算系统。
(3)动态重组和重配置。CPS的目标是完成各种任务,那么各种资源要能够根据任务的情况,动态地进行重组和重配置,当某些资源失效,如感知设备电池耗尽了,要能够自动地组织其他资源做补充。
【问题2】
物理层:交通CPS中,汽车、道路设备不再仅仅是简单的机械设备,而将是嵌入大量传感器、计算、控制部件的智能体。智能汽车、智能道路、智能桥梁等交通智能设备分布在环境中,直接与物理环境相互作用,这些有感知、计算以及控制等功能的交通设备构成了交通CPS的物理层。
网络层:单一的、孤立的智能汽车(CPSU)并不能构成交通CPS,只有各种交通CPSU互联互通才能实现交通CPS,交通CPS体系结构中的网络层正是将大量异构CPSU连接起来,实现交通CPSU的互联互通,并支持CPSU的互操作。
应用层:应用层主要是指面向用户提供服务的应用软件,例如智能汽车的车载软件、交通管理部门的集中监控软件等。
张工的四层体系结构与王工的三层体系结构相比,其显著特点是张工的感知层与王工的物理层功能一致,而差别在于张工在感知层之上增加了计算/控制层,使得功能划分更清晰,层次结构更加明确,可确保信息的计算、控制和融合处理的有效性。
张工提出的系统结构具有以下优势:
增加计算/控制层中的计算能力可以有效获取来自感知层或者其他层的数据,可增加综合统计及分析能力,也可对数据经分析、运算后传到其他层,实现交通管理的统计、计算、仿真及显示能力,同时也可降低感知层的计算负荷。
增加计算/控制层的控制能力可以接收来自计算层的数据或来自应用层的用户控制信息,加工处理后生成控制命令,经网络层传送到感知层和计算层,实现对感知层CPSU的控制。增加控制能力可以将比如导航仪、车速控制器等具有控制与调度功能的子系统能力进行信息融合管理。
【问题3】(列出其中五项即可)
驾驶员、行人、乘客、车辆维修人员、操作人员、路面结冰、轮胎爆裂、火灾/水灾、爆炸/自燃、汽油/机油泄漏、信号灯故障、网络故障或丢失
与现有系统相比,CPS系统应具有十项性能需求,即计算/信息过程与物理过程紧密结合、可靠性(reliability)、实时性(real-time)、适时性(timing)、并发性(concurrency)、异质性(heterogeneity)、自治性(autonomous)、分布性(distribution)、安全性(security)和隐私性(privacy)、动态重组(recomposition)和重配置(reconfiguration)。而异质性、分布性、动态重组和重配置是CPS的关键需求,掌握这十项需求的具体含义,对理解CPS具有重要的意义。
(1)异质性。CPS网络将异质部件进行互联,这些异质单元可能包括不同功能的设备、不同公司生产的设备、软件系统不同的设备,甚至编码系统不同的设备。CPS要实现这些异质设备间的无障碍的互操作,需要采取一些“翻译”措施。
(2)分布性。CPS系统中存在大量网络化的嵌入式计算,这些嵌入式计算组成了分布式计算的网络,每个结点的能力有限,是一种典型的分布式计算系统。
(3)动态重组和重配置。CPS的目标是完成各种任务,那么各种资源要能够根据任务的情况,动态地进行重组和重配置,当某些资源失效,如感知设备电池耗尽了,要能够自动地组织其他资源做补充。
依据产生风险的行为分类,风险可以分为基本风险与特定风险。
基本风险:基本风险是指非个人行为引起的风险。它对整个团体乃至整个社会产生影响,而且是个人无法预防的风险。如地震、洪水、海啸、经济衰退等均属此类风险。
特定风险:特定风险是指个人行为引起的风险。它只与特定的个人或部门相关,而不影响整个团体和社会。如火灾、爆炸、盗窃以及对他人财产损失或人身伤害所负的法律责任等均属此类风险。特定风险一般较易为人们所控制和防范。
根据上述定义,考生可从题干中分析出智能交通管理系统可能存在的几种特定风险。例如以下十种:驾驶员、行人、乘客、车辆维修人员、操作人员、路面结冰、轮胎爆裂、火灾/水灾、爆炸/自燃、汽油/机油泄漏、信号灯故障和网络故障或丢失等。







